
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

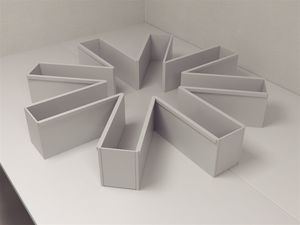
... げっ歯類の作業記憶と参照記憶を評価するために行動研究所で使用される。 プレゼンテーション 八腕放射状迷路は、空間記憶だけでなく、動機づけの手がかり(典型的には食物)に関連した非空間記憶も評価するために、行動実験室で広く用いられている。 動作原理 BIOSEB放射状迷路は、中央に8つのスライドドアがあり、等しい大きさの8つのアームにアクセスできるようになっています。迷路は黒いプレキシグラス製で、高さ調節可能な三脚に取り付けられている(1mまで)。各アームには横方向の壁があり、アームの近位側の高さは遠位側よりも高い。各アームの遠位側には、取り外し可能な凹型カップがあり、カバー(すべて付属)を取り付けたり、取り替えたりすることができる。 スライディング・ドアは、手動または自動で開閉することができます: - ...
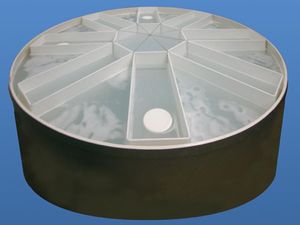
... げっ歯類の学習・記憶評価用 プレゼンテーション BIOSEB放射状迷路は、中央に8つのスライドドアがあり、等しい大きさの8つのアームにアクセスできる。 各アームには側壁があり、アームの近位側の高さは遠位側よりも高い。 このテストは、2つのBIOSEB製品、放射状迷路と円形プールで構成されています。 円形プールはポリプロピレン製で、移動しやすいように4つの車輪が付いた支柱の上に立っている。 ...

... 自由に動けるマウスが、外縁のチャンバーに配置された刺激動物(なじみの動物/なじみのない動物/支配的な動物/異なる性別の動物)と中央のアリーナエリアで過ごす場所に基づく。精神疾患の中核をなす社会的スキルの障害や、マウスモデルにおけるその評価ツールの開発、嗅覚関連行動(アノスミア)の研究のため。 ビデオ追跡ソフトウェアで最適な結果が得られる高品質の迷路(高コントラスト、非反射性)。ネズミの快適性を考慮した表面テクスチャー。設置が簡単で、洗浄も容易。 背景 ...
... 空間学習や記憶課題に最適な放射状腕迷路は、8本の腕の中から動物が選択できる構造になっています。1つのアームを選択した後、中央に戻らないと次のアームが選択できない構造になっています。サンディエゴインスツルメンツ(SDI)では、防水型放射状腕迷路も提供しています。SDIのラジアルアームメイズは、カラーバリエーションも豊富で、選択したアームを閉鎖するための手動式の入口ドアも備えています。SDIのラジアルアーム式迷路は、使用、清掃、運搬が容易で、汎用性の高い独自の設計になっています。 ラットおよびマウスモデル ANY-mazeビデオトラッキングシステムに対応 ソリッドカラーモデル(黒、白、ベージュ)またはクリアウォールモデル(外部キュー使用時) 床は無地とペレットホールの2種類を用意。 アームを閉じるための手動式入口ドア-乾燥迷路と水密迷路の両方に対応 耐久性に優れ、お手入れが簡単なABS樹脂製またはアクリル製 ...

... 人間のための仮想放射状迷路は、ワーキングメモリまたはリファレンスメモリタスク中の広い範囲のパフォーマンスを測定します。 説明 被験者は、キーボードを使用して3D 仮想 12アーム迷路でナビゲートします。 仮想世界は12の腕を残し、そこから円形の中央アリーナで構成されています。 ドアは腕へのアクセスを制限します。 各腕の端では、階段はコイン(報酬)を含む小さなプラットフォームにつながります。 近接および遠位の手がかりは、ユーザーが迷路の中をナビゲートするのに役立ちます。 ...
... ラジアルアーム迷路は、ラットとマウスの空間、作業、および参照学習と記憶のためのテストであり、いくつかの洗練されたテストプロトコルを可能にします。 例えば、動物は、迷路の内部または外部の手がかりに頼ることによって、腕の一つで食糧報酬の場所を学んだり、どちらが出発点から取るようになったかを暗記しているかもしれません。 ワーキングメモリを調査する際には、通常、すべての腕に報酬が与えられ、動物は各腕を1回だけ訪問する必要があります。 基準記憶の評価に使用される場合、一部の腕のみが報酬を含み、動物は餌付けされた腕のみを訪問すべきです。 ...
... 製品情報 伝統的な8ラジアルアーム迷路は、マウス、ラット、さらには霊長類が再入場を避けることによって訪れた腕のための空間的な作業記憶を表示することを可能にする多くの変形を有する。 通常は、テスト環境の extramazeランドマークに対して訪問した腕の空間的位置をメモリに依存することによって行います。 エクストラマゼとイントラマゼのキューは、このプロセスの鍵です。 ...
MazeEngineers

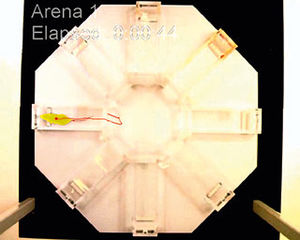
... 放射状腕木迷路試験は、ネズミの空間学習、作業学習、参照学習を調べるために使用されます。このテストでは、すべてのアームの末端または選択されたいくつかのアームに餌を置いておきます。餌のない腕(non baited arm)に2回以上入ることなく、各腕に入ることを学習させる。もし動物が2回以上アームに入った場合、作業記憶エラーと呼ばれ、動物が餌のないアームに入った場合、参照記憶エラーと呼ばれる。 ...
詳細をお書きください:
サ-ビス改善のご協力お願いします:
残り