
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

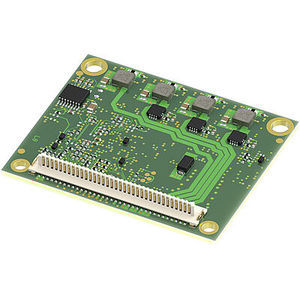
V3.0, 4-Quadrant PWM with RS232 or CANopen interface Supply voltage: - 6 ... 30 V DC Max. continuous output current: - 1,4 A Peak current: - 5 A
FAULHABER Drive Systems
... via CANopen or RS232, and for commissioning, primarily the USB interface is used. Additionally, an optional EtherCAT module enables cycle times as short as 1 ms. In conclusion, the motion controllers ...
FAULHABER Drive Systems
... via CANopen or RS232, and for commissioning, primarily the USB interface is used. Additionally, an optional EtherCAT module enables cycle times as short as 1 ms. In conclusion, the motion controllers ...
FAULHABER Drive Systems

V3.0, 4-Quadrant PWM with RS232 or CANopen interface Supply voltage: - 6 ... 30 V DC Max. continuous output current: - 1 A Peak current: - 5 A
FAULHABER Drive Systems

1-Axis controller with microstepping USB interface and reference input Supply voltage: - 9 ... 36 V DC Max. continuous output current: - 1,1 A Peak current: - 1,6 A
FAULHABER Drive Systems

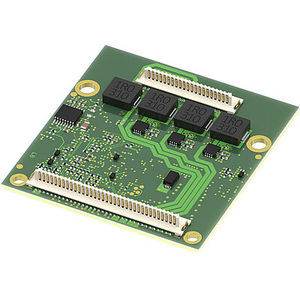
V2.5, 4-Quadrant PWM with RS232 or CAN interface Max. continuous output current: - 2 A Peak current: - 3 A
FAULHABER Drive Systems

V2.5, 4-Quadrant PWM with RS232 or CAN interface Max. continuous output current: - 2 A Peak current: - 3 A
FAULHABER Drive Systems

V2.5, 4-Quadrant PWM with RS232 or CAN interface Max. continuous output current: - 2 A Peak current: - 3 A
FAULHABER Drive Systems

V2.5, 4-Quadrant PWM with RS232 or CAN interface Max. continuous output current: - 2 A Peak current: - 3 A
FAULHABER Drive Systems

V2.5, 4-Quadrant PWM with RS232 or CAN interface Max. continuous output current: - 2 A Peak current: - 3 A
FAULHABER Drive Systems
Please specify:
Help us improve:
remaining